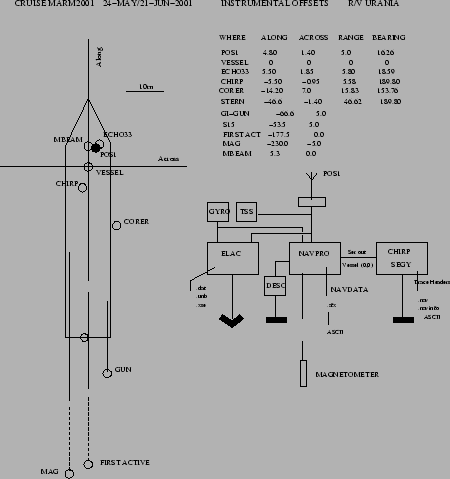
The Positioning system NAVPRO V5.6 by Communication Technology (Cesena, Italy) was used. The instrumental offsets are presented in Fig. 7 and in Tab. 3. The integrated system used a Microtecnica and a Meridian Surveyor SG-BROWN (see below) Gyrocompasses,and a Trimble 4000 Differential Locator, with a DGPS Satellite link by FUGRO. The datum was WGS84 and the Direct Mercator projection on 41 30.00'N was chosen for navigation and display. Timing was set to UTC. The SBP-CHIRP workstation received the 'VESSEL(0,0)' positions by the NAVPRO serial output. These positions were therefore recorded on the SEGY trace headers. The speed of Sound for DEPTH 1 and 2 was set to 1500m/sec, with a transducer immersion of 3.8m.
figure