Table of Contents
- 2.1. How Sound Travels Through Water
- 2.1.1. Speed of Sound
- 2.1.2. The Effects of Sound Speed Errors
- 2.1.3. Spreading Loss
- 2.1.4. Absorption
- 2.1.5. Reverberation
- 2.2. How Sound Interacts with the Sea Floor
- 2.3. Acoustic Interference
- 2.3.1. Radiated Noise or Self Noise
- 2.3.2. Flow Noise
- 2.3.3. Bubble Sweep Down
- 2.3.4. Cross Talk
- 2.4. Signal to Noise Ratio
- 2.5. Swath Mapping Sonar Systems
The basic measurement of most sonar systems is the time it takes a sound pressure wave, emitted from some source, to reach a reflector and return. The observed travel time is converted to distance using an estimate of the speed of sound along the sound waves travel path. Estimating the speed of sound in water and the path a sound wave travels is a complex topic that is really beyond the scope of this cookbook. However, understanding the basics provides invaluable insight into sonar operation and the processing of sonar data, and so we have included an abbreviated discussion here.
The speed of sound in sea water is roughly 1500 meters/second. However the speed of sound can vary with changes in temperature, salinity and pressure. These variations can drastically change the way sound travels through water, as changes in sound speed between bodies of water, either vertically in the water column or horizontally across the ocean, cause the trajectory of sound waves to bend. Therefore, it is imperative to understand the environmental conditions in which sonar data is taken.
The speed of sound increases with increases in temperature, salinity and pressure. Although the relationship is much more complex, to a first approximation, the following tables provides constant coefficients of change in sound speed for each of these parameters. Since changes in pressure in the sea typically result from changes in depth, values are provided with respect to changes in depth.
Change in Speed of Sound per Change in Degree C
---> + 3 meters/sec)
Change in Speed of Sound per Change in ppt Salinity
---> + 1.2 meters/sec
Change in Speed of Sound per Change in 30 Meters of Depth
---> + .5 meters/sec)
[1]
Temperature has the largest effect on the speed of sound in the open ocean. Temperature variations range from 28 F near the poles to 90 F or more at the Equator. Of course, relevant temperature differences with regard to multibeam sonar systems are the variations that occur over relatively short distances, in particular those that occur with depth. These are discussed further below.
While the salinity of the world's oceans varies from roughly 32 to 38 ppt. These changes are gradual, such that within the range of a multibeam sonar, the impact on the speed of sound in the ocean is negligible. However near land masses or bodies of sea ice, salinity values can change considerably and can have significant effects on the way sound travels through water.
While the change in the speed of sound for a given depth change is small, in depth excursions where temperature and salinity are relatively constant, pressure changes as a result of increasing depth becomes the dominating factor in changes in the speed of sound.
The composite effects of temperature, salinity and pressure are measured in a vertical column of water to provide what is known as the "sound speed profile or SSP . A typical SSP is shown below:
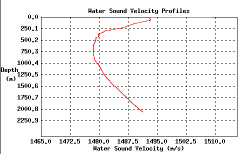
From the SSP above, one can see an iso-speed layer from the surface down to a few tens of meters due to mixing of water from wave action. This layer is called the "mixed surface layer" and is characterized by a flat or slightly negative (slanting down to the right) sound speed profile. The iso-speed layer is followed by a seasonal thermocline down to about 250 meters. Below, a larger main thermocline exists. These variations in the SSP are almost entirely due to changes in temperature of the water. Below the main thermocline, the temperature becomes largely constant and changes in pressure due to depth have the dominant effect on the SSP causing it to gradually increase.
There are two fundamental sound speed measurement inputs into multibeam sonar systems. These are 1) the speed of sound at the keel of the ship in the vicinity of the sonar array, and 2) the profile of sound speed changes vertically in the water column. The former is used in the sonar's beam forming while the latter is used more directly in the the bathymetry calculations.
In an effort to understand the effect on sonar performance of an incorrect sound speed at the keel, we must discuss the process of beam forming. This discussion surrounds a single simplified beam forming method, of which there are many. However it illustrates the effects well and the results can be applied to any sonar system.
The sound speed at the keel of the ship, local to the array, affects the directivity of the beams produced by the sonar. The result is that the sonar is not exactly looking in the direction we expect, introducing considerable error.
In multibeam sonar, a beam is formed by summing the sounds measured by multiple hydrophones time delayed by a specific amount with respect to each other. The following illustration depicts an array of hydrophones with an incident planar sound wave.
From this figure above, it is clear that the hydrophones will measure the incoming sounds simultaneously. However when the sound wave is incident from some angle , the hydrophones closer to the source will detect the sound prior to those farther away. Look at the figure below.
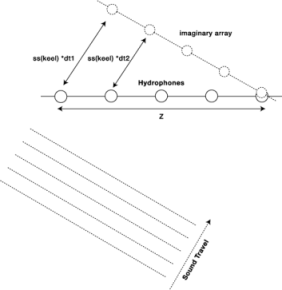
To listen in that direction, therefore, sonar systems sum the sounds measured from each hydrophone after delaying its measurement by the amount of time it would take for the sound to travel from the closest hydrophone. The result is an imaginary hydrophone array shown in the figure above, where the angle with respect to the actual array might be considered the direction the sonar beam is pointing. In this way, sounds coming from this direction are measured at each hydrophone in the imaginary array simultaneously.
As an example, assume the array is attempting to listen in a direction 30 degrees from its orientation. The sonar calculates the distance between the first hydrophone and the last hydrophone in the direction it is listening. This distance, X is simply
X = Z Sin (30)
The sonar divides the speed of sound at the keel into this distance X to get the time it will take the sound return to travel from the closer hydrophone to the further one.
t=X/ss
The measurements of the closer hydrophone are then summed with those of the further hydrophone delayed by this interval such that the arrival of the sound signal at the last hydrophone coincides with the delayed measurement of this closer hydrophone.
If the sound speed used to calculate this delay time is too low, the calculated delay time will be too large. A larger delay time results in a beam that is pointed further away from orthogonal than has been assumed.
If all this is confusing, just try to remember:
SS(Keel) Too Low - > Beam Fan Pattern Too Wide
SS(Keel) Too High - > Beam Fan Pattern Too Narrow
It is important to realize that the beam perpendicular to the plane of the sonar array is directionally unaffected. Only the beams formed by delaying the signals from individual hydrophones look in the wrong direction when the speed of sound at the keel is in error. This implies, of course, that the effect a sound speed error has on any given data set are largely dependent on the orientation of the installed sonar.
Many sonar arrays are installed flush with the hull of the ship and parallel to the sea (nominal) floor. A sonar array installed parallel to the sea floor sees little or no error in the nadir beam due to errors in the keel sound speed. However, because of the high beam angles at the outer beams, the errors are exacerbated at the edges of the swath. When the value is too low, the beam fan shape is erroneously wide, causing the measured bathymetry at the outer beams to be too deep. (Sound travel times are erroneously longer for the wider beams.) This causes the cross track shape of a swath to "frown". The converse is true, of course, for keel sound speeds that are too high.
Other sonar arrays are installed on a V-shaped structure mounted to the bottom of the ship or towfish. For these sonars, the zero angle beam, whose direction is unaffected by the keel sound speed, is that which is formed perpendicular to the array at some angle from nadir. The effect on the beam pattern, is the same - keel sound speed too low -> beam pattern is too wide - keel sound speed too high -> beam pattern too narrow. However, in this case, the effects on the data set are slightly different. A wider beam pattern does indeed cause erroneously deep bathymetry values at the beams furthest from the ship's track, but the beams directly beneath the ship will be erroneously shallow. Similarly, a narrower beam pattern causes erroneously shallow bathymetry values at beams furthest from the ship's track and erroneously deep values directly beneath the ship.
In both sonar installation orientations positive keel sound speed errors result in "frowns" in the cross track swath profile, while negative errors result in "smiles". The distinction to make is that the beams unaffected by these errors are beneath the ship for the former and at an angle orthogonal to the sonar array for the latter.
One final effect to point out. Multibeam sonars use beam forming both for projection as well as for reception of sound pulses. Moreover, beam forming is done, not only in the athwartships direction to create a swath, but fore and aft to increase measurement resolution. Typically the beam footprint created by the projectors on the sea floor is large compared to that created by the receivers. In this way, errors in the receive footprint still fall within that of the projection footprint. However significant sound speed errors at the keel can upset this balance lowering the signal to noise ratio of the sonar and compromising data quality.
Here's the kicker. ERRORS IN KEEL SOUND SPEED ARE (typically) NOT RECOVERABLE! Let us say that again:
Warning
ERRORS IN KEEL SOUND SPEED ARE NOT RECOVERABLE!
Because sonar systems do not save wave forms from individual hydrophones, one cannot go back and apply corrected sound speed values to beam forming calculations. This value must be correct the first time. Therefore, and it cannot be stressed enough, sonar operators must always be conscience of the correct operation of any device that provides the keel sound speed measurement to the sonar.
Bathymetric sonar systems calculate water depths by measuring the time it takes a sound pulse to travel to the bottom and back to the receiver. To translate these time measurements into distances, one must know the speed at which sound travels through water and the general trajectory the sound traveled. As we have seen, temperature, pressure, and salinity all contribute to the speed of sound in water. Moreover, differences in sound speed across the water column acts as a lens bending the path that sound travels. For these reasons, it is imperative to have accurate sound speed profiles for any data set.
Inaccurate sound speed profiles may be the single largest correctable cause of bathymetry errors in multibeam sonar data. Understanding the various effects errors in sound speed can have on sonar data is challenging and deserves careful consideration. Even more difficult, is recognizing these errors from other sources of error in the data. A solid theoretical understanding is essential.
Errors in the sound speed profile produce predictable, although often confused, results in the data.
For example, a simple step offset in the sound speed profile will cause the calculated bathymetry to be shallower for higher sound speeds, and deeper for lower sound speeds. Not so obvious, is that relative changes in sound speed down through the water column cause sound to bend, a process called refraction. Therefore, errors in the relative changes in sound speed through the water column cause errors in the calculated sound trajectory. Because the bending is larger for sound traveling at oblique angles to the gradient, oblique beams (usually the outer ones) have more error. All of this is further complicated by the fact that sound speed profile errors high in the water column can exacerbate or offset the effects of those lower in the water column.
It is convenient, when talking about sound and its travel path from a point, to consider the path as a ray. This is a common technique in wave theory, used in optics and other sciences. In a homogeneous medium sound does indeed travel in a straight line. However, when a sound wave passes between two mediums having different sound speeds its direction is bent. This is a property of waves more than sound itself, and many theories and explanations, with varying degrees of success, have been put forth over they years. While not true in all cases a simple one for illustration is offered here.
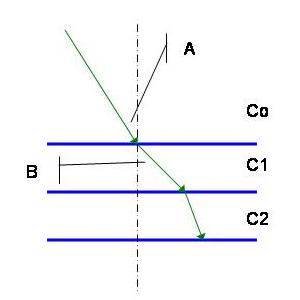
Consider sound wave incident on a boundary between two bodies of water having differing sound speeds as shown in the figure above. Snell's Law states that the Cosine of the initial angle of incidence divided by the initial sound speed is a constant as the sound passes from regions of differing sound speeds.
Cos (A)/ Co = Constant
Therefore, if the new region has lower sound speed, the Cosine of the angle of incidence must be less than that of the previous region. Hence the new angle of incidence is less. So one might imagine the sound bending "toward" regions of lower sound speed, in the sense that the angle of sound travel is more steep, and "away" from regions of higher sound speed in the sense that the angle of incidence is more shallow.
Then if one knows the angle that a sound wave left its source, and the sound speed profile of the medium it passes through, one can calculate the path the wave takes over its entire trip.
A slightly more complicated example is one where the sound speed of a single medium changes linearly with depth rather than at discrete depth intervals. In this scenario, the sound ray bends continuously over its travel path. It can be shown that the path the sound travels is that of the arc of a circle whose radius, R, is the ratio of the initial sound speed and the slope of the gradient (R = Co/g).[2]
This process, of calculating the course of travel of a sound ray through a water column of varying sound speed, is called "ray tracing" and is essential to sonar performance. Since sound does not travel as a straight line though the ocean, sonar systems must calculate propagation paths for both the the ping and return to calculate the correct distance and direction of the reflecting object.
To be sure, the most likely source of sound speed profile errors is simply not measuring it frequently enough. Sound speed profiles change as bodies of waters change and whether, due to insufficiently frequent measurements or plain old inattention, inevitably sound speeds change before sonar operators notice.
But assuming your monitoring the sonar performance, and measurements have been carefully planned, we can consider the likely sources of error. Since in the open ocean temperature and pressure are the largest contributors to changes in sound speed, errors in the sensors aboard XBT and CTD sensors are of central concern. Over the relatively small temperature variation seen by these devices, temperature measurement response is typically quite linear. However inexpensive and non-calibrated sensors common on XBT's and CTD's often have step offset errors (the measurement will be off by a fraction of a degree or more over the entire range). Conversely, because pressure sensors must operate over such a large range (over to 2000 psi), they are much more prone to non-linearity (the measurement error will typically increase with depth).
Consider how these two errors would affect a sound speed profile. An constant temperature error will most significantly affect the portions of the sound speed profile in the thermocline with a proportionally smaller affect in the other regions. Conversely, a depth sensor non-linearity will most significantly affect the deep depth areas and have less proportional affect on the regions where changes in temperature dominate.
The energy radiated from a omni-directional transducer spreads spherically through a body of water. Since all the energy is not directed in a single direction but in all directions, much of the energy is lost. This is called spreading loss. In deep water, to a first approximation, sound spreads spherically from the source, and the power loss due to this spreading increases with the square of the distance from the source. The classical equation is TL=10 Log (r^2) or 20 Log (r) where TL is the transmission loss and r is the distance from source.[3]
In shallow water beyond a certain distance the travel of sound is bounded by the surface and the sea floor resulting in cylindrical spreading. In this case, sound power loss increases linearly with the distance from the source. The classical equation in this case is TL= 10 Log (r), again where TL is the transmission loss and r is the distance from the source.[4]
As sound travels through a body of water, some of the energy in the sound waves is absorbed by the water itself resulting in an attenuation of the amplitude of the original sound wave. The amount of energy that is attenuated in the water column is frequency dependent, larger frequencies exhibiting much larger attenuation than lower ones. [5]
To a first approximation, spherical spreading and absorption losses can be approximated by TL=20 Log (r) + ar where a is a frequency dependent constant with units of dB per unit distance.
Reverberation is a measure of the time it takes a the energy of a sound pulse to dissipate within the water column. Imagine yelling "Hellooooooooo!" from the center of large arena. You'd hear all kinds of echos from the surrounding walls and seats, and since they are distant, the echoes would be delayed from your initial shout. The result would be lots of echos that might last up to several seconds "HELLOOO, Hellooo hellooooo." This is reverberation.
In music halls, reverberation is a desirable thing, as it reinforces the sound waves in a wonderful way to create a more full-sounding experience for the listeners. However in theaters reverberation is not desirable, as the repetitive echos tend to interfere with the clarity and understanding of speech.
As you might expect, the repetitive echos are also a problem for sonars. Sonars attempting to find the bottom can become confused by loud repetitive echos. The result is a drop in the signal-to-noise ratio which results in a higher concentration of false bottom detects. Of course, as the signal of interest becomes smaller the echoes become more of a problem. Hence high reverberation will tend to affect the outer beams somewhat more than the closer ones.
The conditions that cause high reverberation are similar in the ocean to those with which we are more familiar. Like a stairwell with brick walls, deep waters with acoustically hard sea floors act as good reflectors. These conditions cause the largest problems.
To be quite honest, most operators of multibeam sonar systems pay little attention to reverberation levels in the ocean. Indeed, sonars are not designed to provide any indication to the operator that reverberation levels are high. And while ocean sea floor acoustic hardness data is available these are not typically consulted prior to a cruise.
Instead, sonar operators see an increased noise level in their sonar and perhaps a narrowing of the effective swath width due to noise in the outer beams. Because these effects can be caused by any of a multitude of problems and tend to come and go, reverberation level is rarely identified as the cause.
[1] Ulrich p 114.
[2] Ulrich pg 123-125.
[3] Ulrich p 101.
[4] Ulrich p 102.
[5] The topic of absorption is a very interesting one. It has been found be have a much more complex mechanism than a simple viscous heating. Ionic relaxations of MgSO4 and Boric Acid (which are themselves depth, temperature and pH dependent) have been shown to have effects on the absorption of sound (> ~ 5 kHz) in sea water. (Ulrich pgs 102-111.)