|
 |
|
|---|


ICEPOD
An Integrated Ice Imaging System for LC-130s
Science Instruments
Lamont-Doherty Earth Observatory
EXTERNAL LINKS
Pod Proposed Instruments
 |
|---|
a. LIDAR: Riegl Q-240i |
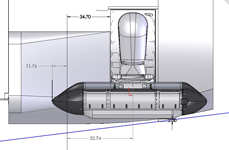
This draft sketch shows a proposed division of internal space for the 8.5 foot long, 2 foot wide pod, based on the sensors discussed for original inclusion. The 3 interior bays are ~ 2 foot cubes, with the end cones providing 2 additional instrument spaces. An Applanix IMU and GPS Antenna will be installed for geo-referencing.
LiDAR - (Light Detection And Ranging) is a fast and reliable airborne method of using a laser to measure distance to the ground, or ice surface, and obtain 3-dimensional data for the creation of a Digital Terrain Model. Combining laser distance measures with attitude measures (tilt from the inertial system) and position (from the GPS), the position and elevation of each spot can be calculated. The swath LiDAR will be used to image detected change in outlet glaciers with a high resolution of 10-20cms.
Infrared Camera - A wide angle lens infrared camera will be used to improve our understanding of the polar regions through the detection and study of the progression of thermal anomalies. The system provides precise repeatable measurements of the ice/snow/ocean surface temperature accurate to 0.1°C with a sensitivity of temperature variability of less than 25 millikelvin (mK). In this project the instrument will be used to calculate high resolution swath temperature profiles showing heat loss or gain at sub-decimeter accuracy. The mK temperature measurements can discriminate between ice and snow to document ice sheet structure. For a flight elevation of 1,200 m above the ice/ocean surface the resolution will be 0.6m, and a horizontal swath of 384 m.
Visible Wavelength Camera - Photogrammetric - Photogrammetry is an accurate technique of measuring real world objects and/or conditions directly from photographs. The imagery produced is high resolution digital elevation models created from overlapping images to facilitate calculations of velocity along track with sub-decimeter accuracy. For this project a downward looking digital video camera with a sensing array of 2000 x 2000 elements will be co-located with the IR camera. For a flight elevation of 1,200 m above the ice/ocean surface the resolution for the digital camera will be 0.2m, and a horizontal swath of 384 m.
Radar - Deep Ice Radar (DEEP) - for Bed Elevation - Deep Ice Radar or Ice-Penetrating Radar pulses a radio or microwave frequency signal that penetrates the ice surface to the bed below. In the crevassed ice of an outlet glacier DEEP can image ice thickness through 1-2 km ice, and in the interior of the ice sheets it can move through 3-4 km of ice to resolve the reflectivity of the bed, allowing us to constrain whether there is water at the bed. The sensitivity for ice thickness measurements is 10 meters or better. The radar will have a center frequency of 150 MHz and a bandwidth of up to 40 MHz. The DEEP radar is designed as fin like blades installed on the pod exterior.
This single, low frequency beam radar will be used for ice sheet thickness, basic bed mapping, basal reflectivity to show the distribution of basal water, internal layers to show ice dynamics, and accretion ice on the bottom of the ice layer to show basal hydrology. The radar will need to be located outside the pod without adding to the drag on the plane or causing additional testing of the instrument package.
Radar - Shallow Ice Radar (SIR) (100-200m) - Shallow Ice Radar radar allows area wide spatial mapping of the annual accumulation layers in the icesheet. The radar will be used to image the firm ice with 1-2 m resolution, in order to map the variability of accumulation in regions of interest and to accurately convert surface change to overall mass change.
The SIR is a small downward looking airborne radar working in the L-band. It is designed to provide high-resolution images of near-surface features within ice up to 100m thick. This makes it ideal for looking at the internal structure and ice-water interface at the edges of continental ice shelves, multi-year sea-ice and annual sea-ice with a resolution on the wavelength scale of around 30cm. Operated in tandem with differentially corrected GPS data it will provide geo-referenced sounding imagery of the ice that is being overflown. The units will fit into the two end bays available in the pod and will interface with the power and data connections found there. Data will be recorded to solid-state hard drives on the Master Control Unit located in the Instrument rack inside the aircraft, positioned for easy access by the operator. The system will be run autonomously once data collection has been initiated by the Operator and the Transmitter has been switched on over the target area.
Pod Possible Additional Instruments
Radar - Snow Pack Radar (SPAR) - Similar in design to the SIR but operating between 5GHz to 10Ghz, the Ultra broad band frequency modulated continuous wave radar, or SPAR, will be used to estimate electromagnetic and physical properties of the snow pack. With the ability to see through the snow-pack, but reflected at the snow/ice interface, SPAR is expected to be able to see any annual boundaries within the snowpack. Combining SPAR with the surface mapping LIDAR will provide details of the snow cover over the ice, and allow us to interpret shallow areas that are potential weak layers.
Magnetometer - The addition of a magnetometer will allow us to measure the strength and the direction of the magnetic field in the geologic structures under the ice. This can be used to locate the bedrock sills that form the ice stream grounding lines, essential information for the modeling community in projecting changes in the ice sheet.
L-Band Passive Microwave Radiometer mapping system - The system provides passive microwave remote sensing from the long wavelength end of the microwave spectrum providing penetration of the atmosphere and responding to parameters of the surface such sea surface salinity (SSS). This measure is important in understanding the energy exchange of the atmosphere and ocean circulation. The L-Band system uses a protected frequency band 24 MHz wide at 1.4 GHz with a 15° field of view and a sensitivity of ~0.6 psu.
